
迷い込みました - FAL
2017/12/15 (Fri) 11:37:26
arduinoで動かすECGモニターのアプリをGoogleで調べていたらこのサイトに出くわしました。そしてNマシンについても読ませていただきました。
面白かったです。
Windows7の頻繁なフリーズ現象の原因について - 管理人(☆Tomoaki Ueda☆)
2012/02/20 (Mon) 22:03:04
 最近、所有するWindows7機のうちの1台が頻繁にフリーズする現象に悩まされていました。ブラウザ(Google Chrome)でページ閲覧中やYouTube再生中にちょっと目を離すとフリーズしたり、C#コンパイラの応答が遅くなったり、Word、Excel、PowerPoint利用中にも何回かフリーズで仕事が台無しに。一時は未知のウィルスにやられたかと心配しましたが、何べんチェックしてもそんなものは発見できず、この1か月未解決でした。
最近、所有するWindows7機のうちの1台が頻繁にフリーズする現象に悩まされていました。ブラウザ(Google Chrome)でページ閲覧中やYouTube再生中にちょっと目を離すとフリーズしたり、C#コンパイラの応答が遅くなったり、Word、Excel、PowerPoint利用中にも何回かフリーズで仕事が台無しに。一時は未知のウィルスにやられたかと心配しましたが、何べんチェックしてもそんなものは発見できず、この1か月未解決でした。
でもフリーズのとき、
●ハードディスクが回り続けている。
●2.6GBものメモリがwmpnetwk.exe(WMPNetworkSvc)によって使われている。
●エラーも同時に発生しており、これをシステムが記録し続けており、知らないうちにエラーログファイルのファイルサイズが43GBにもなっている。
という3点が判明しました。
こんなサイズになると、発生したエラーイベントをエラーログファイルに追記するにも最後尾をアクセスするのに時間を要してしまうので、音割れやフリーズの原因になるのです。
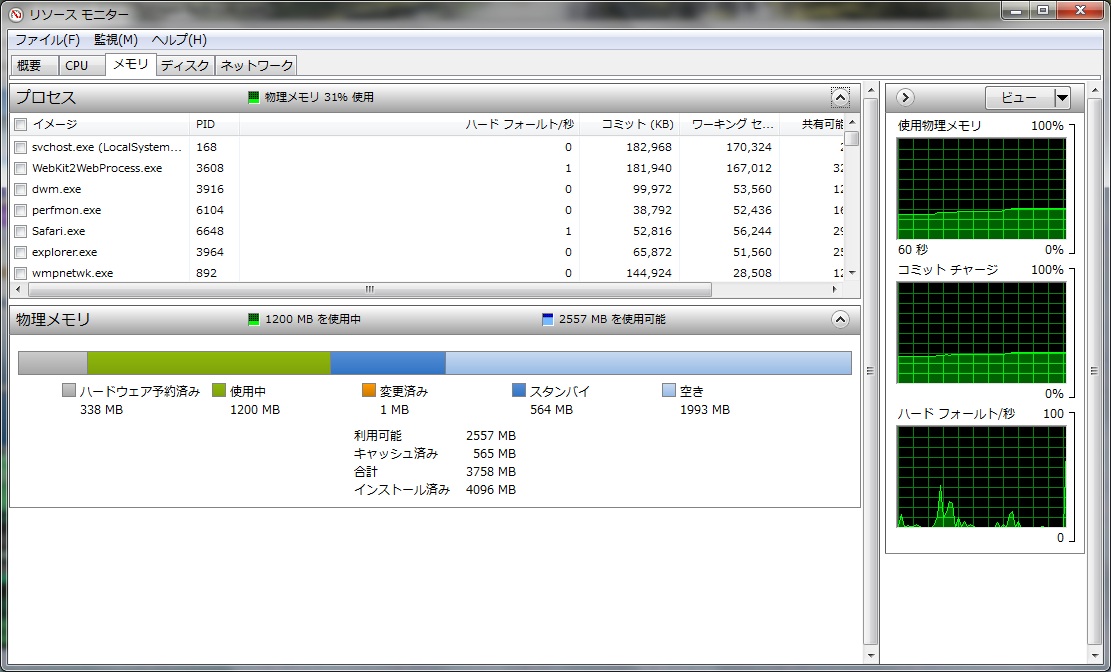
リソースモニタでメモリ使用量を見て、そもそもエラーの原因はWindows Media Player Network Sharing Serviceがメモリを大量(2.6GB)に使用してメモリ不足を引き起こしていることが問題なのだとわかりました。
無線LANに接続しないでPCを使っているときにはフリーズは発生しませんでしたが、無線LANに接続し、Safari、FireFox、Google Chrome等のブラウザで動画閲覧中にフリーズの発生頻度が高かったので、フリーズ発生時に、リソースモニタでメモリの使用状況を確認してみたところ、wmpnetwk.exeが2.6GBも使用しており、メモリ不足の状態であることが判明しました。概ね、ブラウザ起動、動画閲覧から数分~10分くらいでメモリ使用状況に大きな変化が現れました。
このWMPNetworkSvc (Windows Media Player Network Sharing Service)はどうやらネットワーク上にある別のコンピュータのコンテンツの共有サービスを行う
ものらしいのですが、私にはさしあたって不必要なサービスでしたので、以下の手順でサービスを停止させました。
【対処】
①アクセサリ⇒システムツール⇒ディスク クリーンアップ を起動
エラーログファイルを削除
②コントロールパネル⇒管理ツール⇒サービス を起動
Windows Media Player Network Sharing Service を選択
『サービスを停止』
スタートアップの種類を『無効』★に設定
(★右クリックでプロパティーを表示すれば、スタートアップの種類の変更を行うことができます。)
これによって、ブラウザ利用時に頻発していたメモリの大量使用によるフリーズ現象は発生しなくなりました。ほぼ確実にWindows Media Player Network Sharing Service
の処理に不適切な部分があると思われます。ファイルの破損等は原因ではありません。
フリーズはOffice製品(Word, Excel, PowerPoint)を利用中でも発生していましたが、対処後にはメモリ使用状況も大きな変動はなく、大変安定しています。
なお、IE使用時に同じ現象が発生するか否かについては未確認です。
この現象、Vistaではフリーズにまでは至っていませんでしたが、念の為に当該サービスを殺しました。ややApacheの応答が早くなったように感じます。
検索したら山ほど出てきました。
同じ現象に悩まされておられるなら一度お試しあれ。
【追記】上記とは別に以下の問題があります。
●最近Chromeにはバグが沢山発生しています。
1)Marqueeタグにスクロール停止の不具合
2)Marqueeタグにメモリ制限?
3)JSONPのテキストに改行コードが含まれる場合
1MBを超える場合にはフリーズする
●その他、解析できないバグと思われる現象が、他に3件あります。
●2012年1月を境に発生が頻発しています。性能はどんどん劣化する一方で、現状はFireFoxやSafariの方が優れているかもしれません。
Re: Windows7の頻繁なフリーズ現象の原因について - 管理人(☆Tomoaki Ueda☆)
2012/04/03 (Tue) 15:02:32
 2012年04月03日に追記
2012年04月03日に追記
図は正常時のメモリ使用状態
Re: Windows7の頻繁なフリーズ現象の原因について - ありがとうサイトの主さん
2013/06/22 (Sat) 19:22:48
ありがとうございます
本当にありがとうございます
助かりました 一番わかりやすく書かれていると思います
(*´∀`*)ありがとうサイトの主さん 助かりました
( ;∀;)ありがとう心からありがとうm(_ _)m
Re: Windows7の頻繁なフリーズ現象の原因について - かみちゃん
2014/06/10 (Tue) 04:21:02
ありがとう これを実行してみます
Re: Windows7の頻繁なフリーズ現象の原因について - n
2014/11/02 (Sun) 01:58:47
わかりやすかったです。ありがとうございました。
Re: Windows7の頻繁なフリーズ現象の原因について - あ
2015/05/14 (Thu) 17:33:39
他にフレッツ光などのセキュリティー設定してる場合はwindowsdefenderを無効にしないと動画フリーズしますね
Re: Windows7の頻繁なフリーズ現象の原因について - はむ
2016/05/15 (Sun) 09:43:51
これで様子を見てみます。
ありがとうございました。
Re: Windows7の頻繁なフリーズ現象の原因について - TY
2016/06/10 (Fri) 12:06:41
フリーズの悩み 試しに実行しました。
これで数日間様子を見てみます。では
Re: Windows7の頻繁なフリーズ現象の原因について - ぱぱす
2017/10/02 (Mon) 22:15:29
ご指摘の対処法を実行後、ブラウザ(Firefox)を再起動したら治りました。感謝の極みです。
ネットワーク速度もベンチマークも全く問題がなく、タスクマネージャで確認してもCPUリソースを消費しているプロセスが無かっため、原因がわからず途方に暮れていましたが、おかげさまで助かりました。
Re: Windows7の頻繁なフリーズ現象の原因について - 774R
2017/11/03 (Fri) 16:45:14
超絶助かった。バカみたいだが何年も困っていたんだよ。色々と試して全て駄目だったのに!惜しむらくはもう少しだけ早くこの記事を見つけたかったね。まぁおかけで今は5年ぶりにパンツを履き替えたみたいに清々しい気分だ、ありがとう。
容量結合型心電計の件 - 青木 洋
2017/07/27 (Thu) 10:25:39
容量結合型心電計について最近つぶやかれていますが、伺ってお話を聞くことできますか? 3Dカメラについては12年ほど前に米国ベンチャーのカネスタと共同開発を行った経緯があります。その時は早すぎて物になりませんでした。また盛り上がっていますね。
163data.com.cn系サーバー群による通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/13 (Tue) 23:46:25
中国福建省福州市からの不審なSPAMアクセスについて調査したところ、最大20回/分の頻度で、多数のサーバーを使ってGET / POSTを繰り返し、トラフィック障害を与える状態に達している事が判明した。Apacheサーバーをお使いの場合には以下の対策を薦める。これはクローラーではなく、そもそも163data.com.cnや.cnでのアクセス禁止に従わないので、直接IPで弾く必要がある。なお、北京、上海からのアクセスと関連性が認められるため、国家ぐるみでやっている可能性が非常に高い。当該IPアドレスのアクセスを禁止し、どこか外部サーバーに飛ばしてそこで大容量のエラーメッセージ(HTML)を表示し、サイトでPOSTを禁止すればかなり障害を軽減することができる。なお、403: Forbiddenエラーメッセージはサイト内で表示を行わず、外部サイトで表示する方が好ましい。とにかく自サーバーからの送信バイト数を減らす事が対策の鍵となる。
Options Indexes FollowSymLinks
AllowOverride None
<Limit POST>
Order deny,allow
Deny from all
</Limit>
Order allow,deny
Allow from all
Deny from dynamic.163data.com.cn
Deny from cn
Deny from sg
Deny from 14.208.0.0/12
Deny from 27.148.0.0/14
Deny from 27.152.0.0/13
Deny from 36.248.0.0/14
Deny from 42.62.37.189/17
Deny from 58.22.0.0/15
Deny from 58.35.0.0/16
Deny from 58.37.0.0/16
Deny from 59.32.0.0/12
Deny from 59.56.0.0/12
Deny from 60.176.0.0/16
Deny from 60.188.128.0/17
Deny from 61.154.0.0/16
Deny from 61.240.0.0/14
Deny from 69.197.128.0/17
Deny from 101.224.0.0/13
Deny from 110.80.0.0/13
Deny from 110.88.0.0/14
Deny from 112.111.0.0/16
Deny from 112.112.0.0/14
Deny from 114.66.128.0/17
Deny from 114.216.0.0/13
Deny from 116.12.48.0/21
Deny from 116.52.0.0/14
Deny from 117.24.0.0/13
Deny from 117.60.0.0/14
Deny from 117.80.0.0/12
Deny from 119.78.0.0/15
Deny from 119.96.0.0/13
Deny from 119.161.154.0/21
Deny from 119.144.0.0/14
Deny from 119.176.0.0/12
Deny from 120.32.0.0/12
Deny from 120.40.0.0/14
Deny from 121.32.0.0/14
Deny from 121.204.0.0/14
Deny from 121.224.0.0/12
Deny from 123.52.0.0/14
Deny from 123.125.71.0/24
Deny from 123.184.0.0/14
Deny from 123.112.0.0/14
Deny from 124.67.0.0/16
Deny from 124.72.0.0/16
Deny from 124.76.0.0/14
Deny from 125.77.0.0/14
Deny from 125.80.0.0/13
Deny from 125.88.0.0/13
Deny from 125.112.0.0/17
Deny from 129.254.0.0/16
Deny from 137.132.0.0/16
Deny from 163.142.0.0/16
Deny from 175.42.0.0/15
Deny from 175.44.0.0/16
Deny from 180.152.0.0/13
Deny from 180.76.0.0/16
Deny from 182.112.0.0/12
Deny from 183.136.129.64/27
Deny from 202.46.32.0/19
Deny from 202.103.49.192/26
Deny from 202.108.0.0/16
Deny from 218.26.0.0/16
Deny from 218.77.0.0/19
Deny from 218.85.0.0/14
Deny from 218.93.0.0/16
Deny from 219.128.0.0/13
Deny from 220.160.0.0/14
Deny from 220.161.0.0/16
Deny from 220.181.0.0/16
Deny from 220.185.192.0/18
Deny from 220.191.0.0/17
Deny from 220.248.0.0/14
Deny from 220.249.128.0/18
Deny from 220.255.0.0/16
Deny from 221.10.0.0/16
Deny from 221.130.0.0/15
Deny from 221.176.0.0/13
Deny from 221.204.0.0/15
Deny from 221.236.0.0/15
Deny from 222.76.0.0/14
【エラードキュメントは外部サイトで表示】
ErrorDocument 403 http://neotechlab.web.fc2.com/Msg/ErrorMessage403.htm
Re: 163data.com.cnの通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/13 (Tue) 23:56:23
上記の設定により、平均30回/時間にまで頻度を低下させることに成功した。なお、Apacheの設定で、自サーバードメイン内でエラーメッセージ(403)を発生させず、外部サーバー上に存在するエラーメッセージを表示させなければ頻度は低下しなかった。現在、
http://neotechlab.web.fc2.com/Msg/ErrorMessage403.htm
に飛ばして時間稼ぎを行っている。本当はもっと巨大なHTMLファイルを読み込ませた方が良いだろう。本当はJavaScriptもHTML本文内に含める方が良いだろう。
Re: 163data.com.cnの通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/14 (Wed) 00:00:54
現在、同種の問題を抱えておられる方のブログを発見し、下記IPアドレスも追加するかどうかについて精査中である。
58.48.0.0/13
58.60.0.0/14
59.52.0.0/12
61.140.0.0/11
61.169.0.0/13
218.78.0.0/11
222.170.0.0/13
222.208.0.0/13
Re: 163data.com.cnの通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/14 (Wed) 00:39:00
以下のURLも主犯に関係していると考えられる。
【HTML構造調査役】『中華人民共和国広州』
Deny from 14.208.0.0/12
【JavaScript分析役】『中国湖南省长沙』
Deny from 218.77.0.0/19
Re: 163data.com.cnの通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/14 (Wed) 05:52:45
ほかのブログを見る限り、ブログにSPAM投稿をするという事だが、当サイトにはphpもなく、POSTを受け付ける構造ですらない。当サイトではデータ転送をGETのパラメータを使って行っている。であるにも関わらず、GETとPOSTを特定の規則で繰り返しており、ある種のハッキングを行おうとしているようにも見受けられる。(単にトラフィック障害を引き起こさせる事が目的と考える方が自然だが。)
また、ツイートでGETでのパラメータの話を書いたら、早速HTML構造を14.208.0.0/12のIPアドレスから調査に来た。ハッキング狙いだとしか思えないwww
Re: 163data.com.cnの通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/14 (Wed) 07:20:17
こいつらの特徴はPOSTを行うことなので、ログでPOSTを検索するだけで、新たな追加IPアドレスを検出することができる。なお、アクセス禁止設定を行い、403エラーに対して外部サーバーのエラーメッセージを表示させる場合にはGETのみでPOSTは行わないので、新規参加のIPアドレスだけ簡単に見つける事ができる。
Re: 163data.com.cnの通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/08/21 (Wed) 04:21:14
<Limit POST>でPOSTを禁止し、403エラーを外部サイトで表示して以来、新たなサーバーの追加は全く検出されていない。それでも最大20回/分のアクセス頻度になる時間帯がある。現状は367バイト/回しか返送しないので、トラフィックを低減することができるようになった。
もし、この設定を行わず無対策ならば1000~10000倍近いデータを無駄に送信する事態になっているので、ほぼ接続不能な状態に陥るはずである。
現在、反撃手段は他にあるが、有事に備えて温存し、実力行使を行ってはいない。
身近なニュースで見れば、郵貯銀行の通信障害もこれが原因ではないかと考えている。一番の有効な対策は上位回線レベルで上記の対策を行い、当該中国IPの遮断を日本国として行ってくれる事である。
検索すれば、Gmailアカウント乗っ取りをはじめ、163data.com.cnが如何に悪名高いサイバー攻撃を行っているかわかると思う。FTPやリモート接続のためのポートは普段開かないようにしておくべきだし、WindowsにデフォルトでインストールされているJavaは即座にアンインストールしておくべきだと忠告いたします。ページを表示しただけでゾンビになる攻撃で利用されているからです。元々サイバー攻撃で利用するために設計された言語である可能性さえあると思います。アンインストールしても困ることは殆どありません。パソコン向けのサイトでJavaを使っている所は殆どないからです。今の主流はHTML5+JavaScriptです。困りません。
相手は国家ぐるみでやっているわけで中国サーバーとのIP遮断が最も正しい選択であると思います。なお、日本国内にあるbaiduも挙動不審なのでアクセス禁止に設定することをお勧めします。
Re: 163data.com.cn系サーバー群による通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/09/22 (Sun) 10:18:10
1ヵ月経過して1時間に十数回にまで激減してくれた。だが向こうは定期的に様子を伺っているようなので解除しない。
Re: 163data.com.cn系サーバー群による通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/09/22 (Sun) 10:22:58
本件に関しては、
『杭州市城市管理行政執法支隊直属大隊第一執法中隊』
の関与が濃厚である。
Re: 163data.com.cn系サーバー群による通信妨害対策 - 管理人(☆Tomoaki Ueda☆)
2013/09/22 (Sun) 19:07:30
まだ止めないようなら
http://www.fuzhou.gov.cn/
に飛ばそうか?
スパムアクセス対策に関して
- boota 
2013/08/22 (Thu) 00:32:25
管理人 さま
こんばんは。私のBLOGにコメントを残してくださって、ありがとうございました。
さて、「163data.com.cn系サーバー群による通信妨害対策」に関して私のサーバで行っている対策について簡単にご紹介します。
ご参考になるものがなにかあればいいのですが・・・。
私のサーバでも163data.com.cnをはじめとする各種スパムアクセスに対しては、都度ip addressを拾ってネットワークアドレスを割り出し、(私はiptablesでですが)アクセスをDROPさせる、という方法をとっていました。
ですが、その量が(手作業では特に)膨大な量になること、そしてip address(ネットワークアドレス)は都度変更される(可能性がある)ことから、現在はスクリプトを組んで対応しています。
具体的な手順は http://boota.mydns.jp/blog/?p=2250 や http://boota.mydns.jp/blog/?p=2332 にあるのですが、
要するにネットから最新のcidr.txtを入手し、指定した国コードを持つネットワークアドレスのすべてをiptablesでDROPさせるスクリプトです。
現在、CN(中国)、TW(台湾)、KR(韓国)、CA(カナダ)、RU(ロシア)を指定して、これらの国に割り当てられている全ネットワークアドレスからのアクセスを弾いています。
これで、一時膨大な数に登っていたスパムアクセスを激減させることができています。
ただし、これは「国ごと」アクセス拒否するという大鉈的な対策であり、場合によっては必要なアクセスも弾いている可能性があります(ほとんどありませんけどね)。
その他に行っている対策としては、
BLOGへのスパム投稿の特徴として、ページへの(存在しない)コメントをリファラーにしているアクセスがあったので、httpd.confにSetEnvIfでこうしたリファラーからのアクセスを拒否させるようにしています(詳細は http://boota.mydns.jp/blog/?p=2069 )。
さらに、スパムアクセスのUAはほとんどがMSIE6.0なので、これもUA指定でアクセス禁止にしました。
今のところ大きな実害を伴うようなことはありませんが、UAでの禁止指定は、MSIE6.0しか使えない環境下にある正当なアクセスも弾いてしまうという問題があり(ログに検索エンジンからたどってきたMSIE6.0があった)、現在これはどうしようか考え中です。
また、私の閑古鳥HPに設置してある(放置してある、が正解ですが)掲示板は、capchaを使ってスパム投稿をさせないようにしています。
今のところ対策のほとんどすべてはBLOG用なのですが、少しでもご参考になれば幸いです(^-^)
Re: スパムアクセス対策に関して - 管理人(☆Tomoaki Ueda☆)
2013/08/24 (Sat) 02:52:46
情報をいただきありがとうございます。参考にさせていただきます。BLOGではスパム投稿をしているとのことですね。うちのサイト(www.neo-tech-lab.co.uk)には投稿機能を用意していないのでどうも多目的な迷惑行為を行うために設計されているように思えます。こちらも注意して動向を見守りたいと思います。(^_^)
3Dスキャナ関連図面4 - 管理人(☆Tomoaki Ueda☆)
2013/05/14 (Tue) 18:56:43
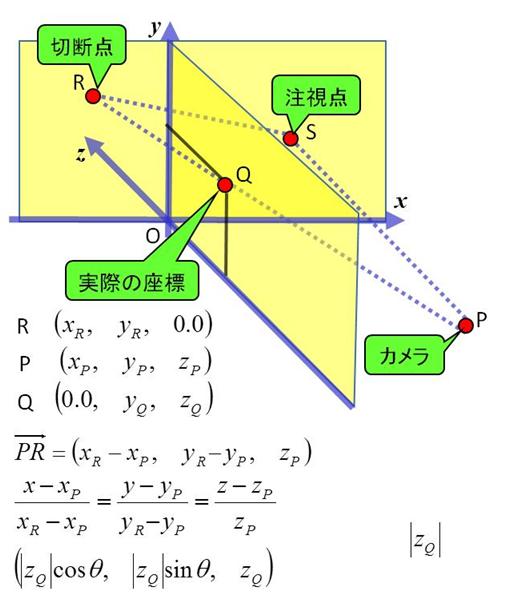
最後の3次元座標を求めるのは座標系の取り方から簡単
3Dスキャナ関連図面3 - 管理人(☆Tomoaki Ueda☆)
2013/05/14 (Tue) 18:55:31
ちょっと複数の技術を入れ過ぎたのでボツ
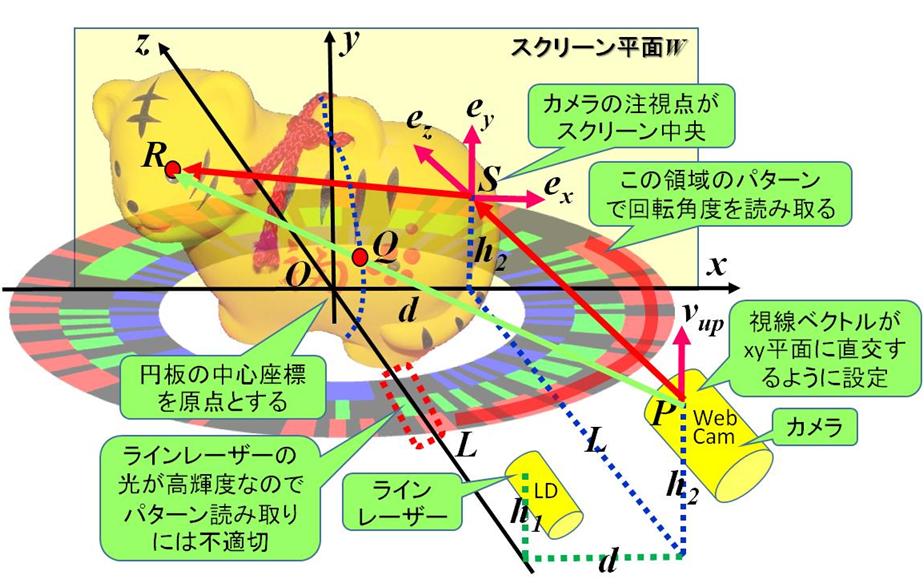
3Dスキャナ関連図面2 - 管理人(☆Tomoaki Ueda☆)
2013/05/14 (Tue) 18:54:08
後で説明を入れようと思うが
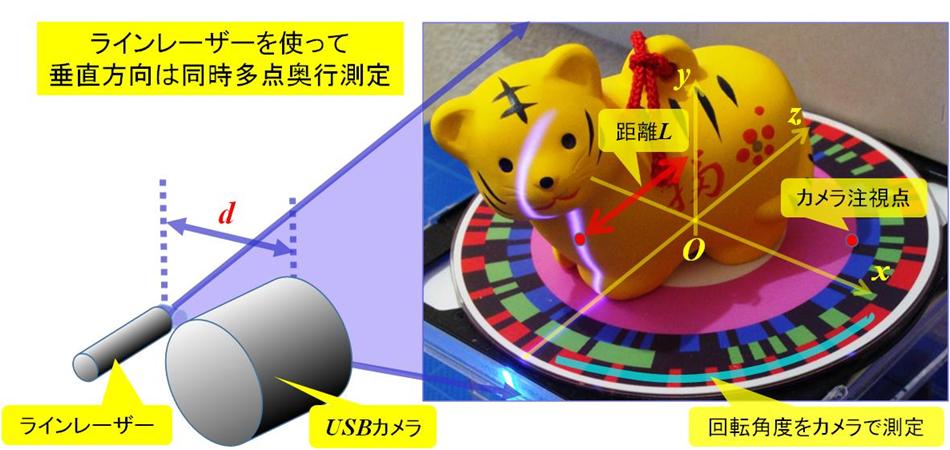
3Dスキャナ関連図面1 - 管理人(☆Tomoaki Ueda☆)
2013/05/14 (Tue) 18:52:31
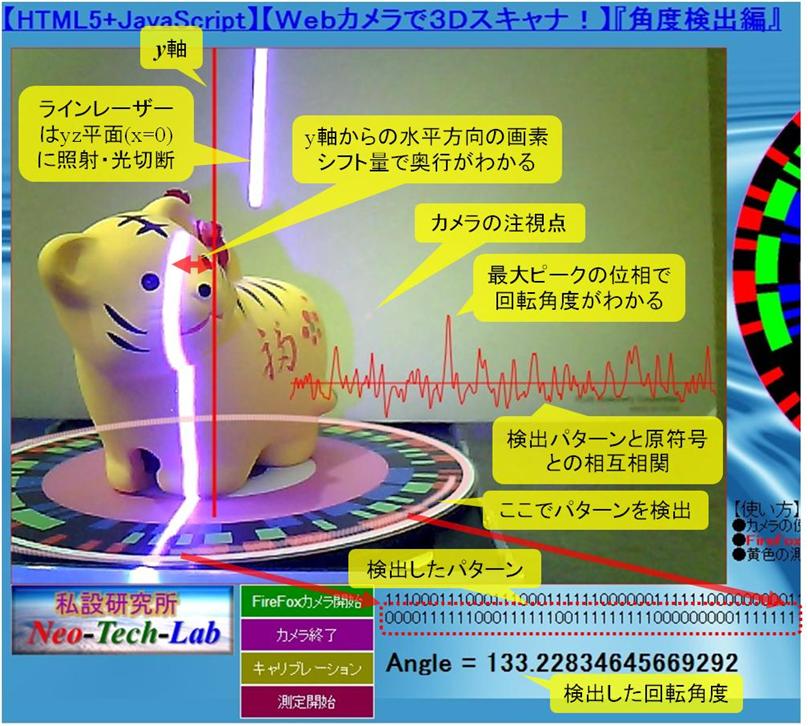
図面のみ残す
【JavaScript】【WebCam】『普通のウェブカメラで脈波センシング』 - 管理人(☆Tomoaki Ueda☆)
2013/03/22 (Fri) 00:41:59
トランジスタ技術2013年4月号のKinectの赤外線カメラで非接触脈波センシングのプログラムを移植。普通のパソコン接続のカメラで脈波センシングを可能にしました。原理は同じで、赤血球のヘモグロビンの吸光特性を使っています。記事に書いた矩形波相関フィルタを使いました。JavaScriptで記述したので、HTML5対応ブラウザで、Webカメラに対応のブラウザなら下記URLで体験することができます。
http://www.neo-tech-lab.co.uk/WebCam/Sample.htm
JavaScriptなので『ソースを表示』でプログラムを見ることもできます。ご覧のように短いコードです。
Re: 【JavaScript】【WebCam】『普通のウェブカメラで脈波センシング』 - 管理人(☆Tomoaki Ueda☆)
2013/03/22 (Fri) 00:46:47
これも関連情報は
http://www.neo-tech-lab.co.uk/ARsensing/index.htm
『Kinectが変えるセンシングの世界』に追記します。
将来的には、普通のWebカメラ(あるいはUSB接続カメラ)でKinectもどきを作る予定です。今、オリジナル骨格追尾(Skeleton Tracking)も開発中です。
【Kinect】 Cyber Eye第一次試作 - 管理人(☆Tomoaki Ueda☆)
2013/03/13 (Wed) 10:00:02
実写画像とデプス画像を比較した動画です。
Re: 【Kinect】 Cyber Eye第一次試作 - 管理人(☆Tomoaki Ueda☆)
2013/03/17 (Sun) 04:50:15
【Version1.2】試作体験版
動作説明を加えました。
垂直方向同時5本スキャンライン方式に変更。
姿勢がわかるようにしました。
CPU Intel Core i3 2.27GHz
Visual C#
オリジナル高速デプスカメラ・アルゴリズム - 管理人(☆Tomoaki Ueda☆)
2013/03/02 (Sat) 15:59:05
Kinect for Winodws SDK Version 1.6で取得できるようになった赤外線カメラ画像を使って、オリジナルの高速デプスカメラ・アルゴリズムの検証を行ってみました。
ご覧のように、Intel CORE i3 2.27GHz Windows7 64bit OSでリアルタイム処理に成功しています。
このアルゴリズムはメモリ(EEPROM+RAM)と若干のCPLDロジックでも実現することができるため、これで基本的に、可視光プロジェクタ+USBカメラでデプスカメラが組込マイコン上でも実現できる目途が立ちました。
【参考URL】
http://www.neo-tech-lab.co.uk/ARsensor/KinectSensor.htm
HP閲覧者のおよその現在地を探索するJavaScript - 管理人(☆Tomoaki Ueda☆)
2013/02/11 (Mon) 15:06:13
 現在、HPのアクセス解析は自前のプログラムで行っていますが、この処理がサーバーの負荷となってきたので、クライアント側と外部サーバーに投げ出すパラサイト型クラウドを模索しています。気づかれた方もおられるでしょうが、http://www.neo-tech-lab.co.ukの複数のページに実装を行い、試験運用を行っています。
現在、HPのアクセス解析は自前のプログラムで行っていますが、この処理がサーバーの負荷となってきたので、クライアント側と外部サーバーに投げ出すパラサイト型クラウドを模索しています。気づかれた方もおられるでしょうが、http://www.neo-tech-lab.co.ukの複数のページに実装を行い、試験運用を行っています。
参考資料として、
http://www.neo-tech-lab.co.uk/Cloud/CloudService1.htm
にメモを残しました。
●JSON(P)で答えを返す外部サービスのAPIを利用
●IPアドレスを調べる
●IPアドレスからホストコンピュータ名を調べる
●IPアドレスから地理座標を調べる
●Google Maps APIで表示する
を全てJavaScriptで行っています。
ご参考まで。
YouTube動画の削除有無を調べるJavaScript - 管理人(☆Tomoaki Ueda☆)
2013/02/11 (Mon) 14:52:34
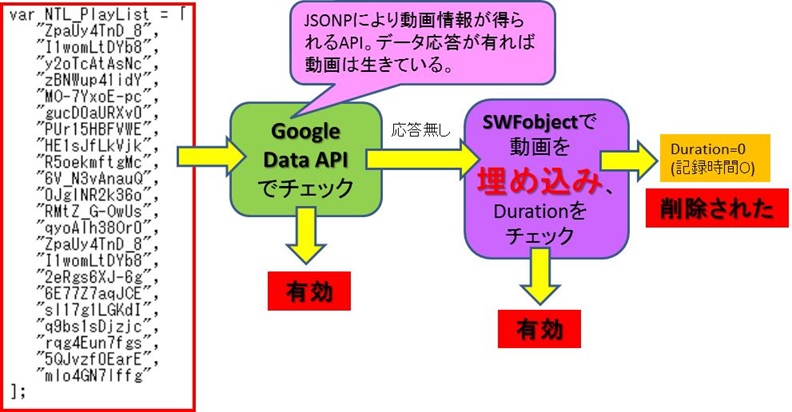
YouTube動画は公開された後で、限定公開、非公開、埋め込み禁止等の設定変更がなされることや、著作権がらみの削除、アカウント削除や取り消し処分に伴って、動画が見えなくなることが結構頻繁に起こります。しかし、多数の動画からそれを調べるのは大変なので、動画IDリストだけに基づいて、削除の有無を調べるスクリプトを作りました。
【関連ページ】
http://www.neo-tech-lab.co.uk/YouTube/
【サンプル】
http://www.neo-tech-lab.co.uk/YouTube/YouTube_Sample5.htm
★JavaScriptのみで記述しています。
Google Maps API v3の使い方 - 管理人(☆Tomoaki Ueda☆)
2013/02/11 (Mon) 14:37:20

Google Maps APIを暫く(数年間)使わなかったが、2年前からv3に更新され、v2は廃止されていたので慌てて勉強してみた。サンプルをメモとして残しておきます。アクセス解析やPanoramio閲覧ツール『PhotoViewer.htm』も『近いうち』にアップデートを予定します。
Kinect SDKのアップデート迫る - 管理人(☆Tomoaki Ueda☆)
2013/02/03 (Sun) 18:35:51
Kinect SDKが近くアップデートされる模様。
SDK Ver.1.6では、デプス・アルゴリズムの高速化、高精度化、広域化が達成され、改善された。これを受けて、Skeleton TrackingやFace Trackingが改善される模様。Hand Trackingも追加されるのでは?
Avator Animationも楽になるといいんだけど...
というか、いい加減ジェスチャーも何とかするべきではないだろうか?
【ソース】
http://ggsoku.com/2013/01/kinect-update-2013-feb/
【Kinect】呼吸と赤外線脈波を非接触モニタリングに成功! - 管理人(☆Tomoaki Ueda☆)
2013/01/25 (Fri) 18:41:19
本日のお遊びの成果。
Kinectのデプス測定で呼吸の非接触センシングに加え、赤外線ランダム・ドット・パターンを使って、脈波も非接触でモニタリングすることに成功した。
原理は、血液中の赤血球に含まれるヘモグロビンの赤外線吸光特性を使っている。
Kinect for Windows SDKはVer.1.6から赤外線カメラのキャプチャーも可能になった。640×480画素、30FPS、16bit/画素で赤外線強度データを取得できるようになった。
下に説明を追加する。
Re: 【Kinect】呼吸と赤外線脈波を非接触モニタリングに成功! - 管理人(☆Tomoaki Ueda☆)
2013/01/25 (Fri) 18:57:54
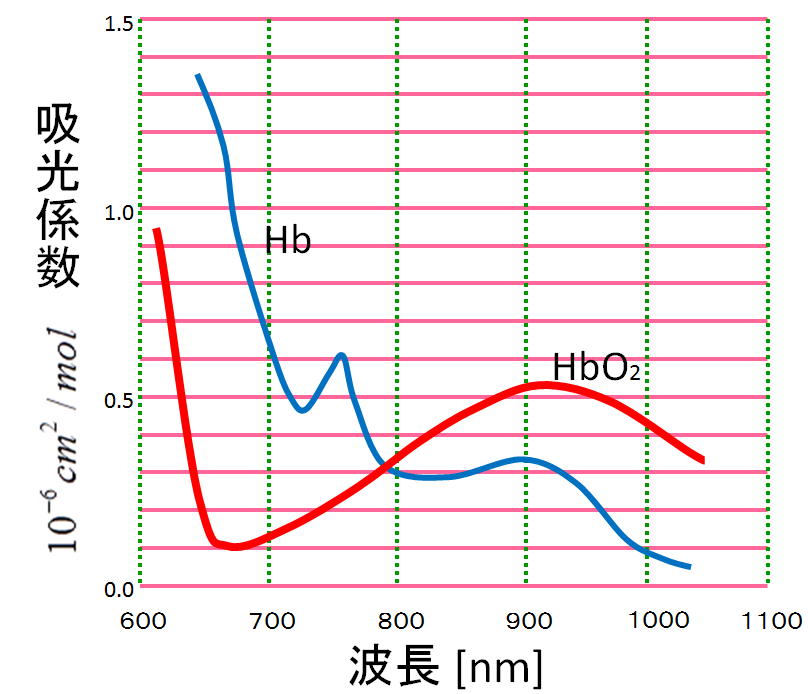
【ヘモグロビンの赤外線吸光特性】
Kinectの赤外線ランダム・ドット・パターンは、波長827nmで照射されているらしい。Kinectブログにもしエミッタの照射を止めて外部LEDで照明を行うならその波長を使うように書いてあったからだ。
酸素と結合しないヘモグロビンHbは赤色光(波長665nm)では吸光度が高いため、静脈血は黒っぽくなるが、酸素と結合したヘモグロビンHbO2が多く含まれる動脈血は赤色光(波長665nm)では吸光度が低いので、結果として動脈血は赤い色になる。
しかし、HbO2でも波長827nmでは、吸光度が高いので心拍に伴って血圧が変化すると、毛細血管の太さが変化するので、赤外線吸光度も変化する。
上述の理由で、波長827nmの近赤外光を照射しながら反射した赤外線の強度変化を捕捉すれば脈拍が計測できるわけだ。でもいろいろな障害要因(乱反射、室内照明のノイズ等)の影響を避けなければならないのでソフトウェアは工夫が必要だった。
絶対やってはいけない接続 - 管理人(☆Tomoaki Ueda☆)
2013/01/25 (Fri) 18:31:18
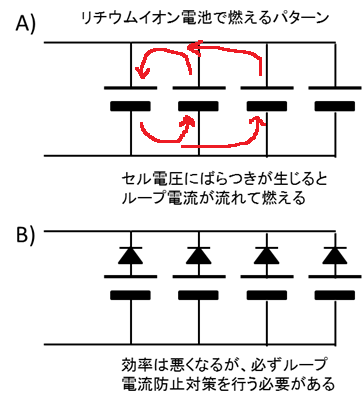
B787でバッテリーが燃える事件があったが、ふと思い出したので書いておく。
リチウムイオン電池でドライブ能力を増やそうとして並列接続を使用するなら、多少効率は悪くなっても必ずループ電流防止対策を行わないといけない。
もし、温度差や劣化でセル電圧に差が生じると、電池内部でループ電流が流れて燃えるからだ。
必ずダイオードを入れる必要がある。
随分昔に、EV用電源を研究する某社研究所でそういう事故があったのだ。
【Kinectで呼吸モニタ】 - 管理人(☆Tomoaki Ueda☆)
2013/01/18 (Fri) 18:55:57
Kinectのデプスカメラを使えば、1m位離れた位置で大体2,3mmの精度で距離測定を行うことができます。Kinectはランダム・ドット・パターンを投影して距離を測定しているので、多数の画素を使えば精度を向上させることが可能です。n=40×40=1600画素の領域を使えば分解能は√n=40倍に向上させることができるのです。
呼吸に伴ってカメラ-胸部間の距離がわずかに変化する様子を捕捉できれば、非接触で呼吸をモニタできるはずと考えて実験してみました。
なんと布団をかぶっていても1m離れて呼吸をモニターすることに成功しました。
【Kinectで赤外線脈波を非接触センシング】 - 管理人(☆Tomoaki Ueda☆)
2013/01/18 (Fri) 18:46:51
Kinect for Windows SDK Ver.1.6から赤外線カメラ映像のキャプチャが行えるようになりました。赤外線ランダム・ドット・パターンを被写体に照射して赤外線カメラで撮影した映像を640×480画素、30FPSで取得することができます。
人間の血液中に含まれる赤血球にはヘモグロビンが含まれており、赤外線を吸収する性質があります。対して、人間の皮膚は赤外線を透過しやすいので、皮膚に赤外線を照射すれば、脈拍によって血圧が変動し、毛細血管にかかる圧力が変化するため、皮膚の赤外線反射率が脈拍によって3%~10%変化します。
なら、Kinectを使えば脈拍計測が非接触で行えるのではないかと考えて実験してみました。